Enjoy!
Sunday, May 12, 2013
Final Blog: The HABL
Instead of a written description of this activity, I created a video of the HABL. Throughout the class, we have been discussing and planning a High Altitude Balloon Launch (HABL), with video imagery of the whole process. We constructed a rig, gathered the necessary materials (Weather Balloon, tracking beacon, etc.) and then waited for a morning with clear skies to finally execute the launch. The link below will take you to the video footage of the launch of this incredible activity.
Sunday, April 21, 2013
Field Activity 10: Balloon Mapping II
Introduction
This follow-up activity is very much the same as the previous activity. Using a balloon and a constructed rig, aerial photos were taken of the UW-Eau Claire campus. Once the data was collected, the images were went through and georeferenced, to be put into a mosaic and thus creating an aerial map of the campus. There was much more work put into this activity, as the last activity was just a test run of sorts.
Methodology
Much of the preparation for this activity was just as it was in the previous activity, however there are a couple noteworthy alterations. The first is that there was essentially no rig for this balloon mapping launch. It was decided that the rig contraption was not essential to the quality of the image collection (merely a very weak backup for a crash landing) so the camera was just secured to the balloon with tape and string, hanging just below the balloon. Another addition to this launch was a stabilizing wing, which was taped to the camera. This addition ensured that the camera would stay at a relatively stable position, and wouldn't be rotating constantly. One final difference was that we filled the balloon with more helium, to ensure that it would rise faster and stay more stable in the air.
After making these revisions and preparing the activity just as before, the image collection began. The balloon was released in the middle of the campus mall, and the length indicators on the string was observed to make sure the balloon reached the desired height (400 meters). Once the balloon was at the correct altitude, the class began leading the balloon around campus as the camera snapped aerial images every second (Figure 1 shows an aerial photo of our starting location). The weather was much more cooperative, with much less wind. Because of this, the class was able to collect aerial photos of the entire campus without much difficulty. We started in the middle of the campus mall, walked around the new Davies Center, walked around Phillips Hall, cut back through the mall to the footbridge, and then walked around the Haas Fine Arts Center. Once that was completed, the balloon was brought down and taken back across the footbridge, where it was once again launched to continue data collection. Because the weather was so favorable, the team lead the balloon from the footbridge to Upper Campus, collecting aerial images the entire time.
Once the data collection procedure was completed, we began to go through the images and pick out suitable images for georeferencing. Georeferencing is a procedure that positions the aerial image in the correct geospatial location by referencing a previously projected raster image (or by using Ground Control Points). For this activity, we collected several Ground Control Points, which are points that can be easily spotted on an aerial image. A team of students went around the campus with GPS units and collected the coordinates of suitable Ground Control Points (in this case, light poles were the most reliable object). We would then use these points and reference them with the corresponding objects on the aerial images so that an accurate aerial map can be created by making a mosaic. This is merely the process of forming one large image of several overlapping georeferenced images. Because the class covered such a large area, it was decided that the campus be split up into six different sections to be georeferenced by the different teams within the class (Figure 2 displays these six different sections). Each team would then submit their mosaic to create the campus aerial map.
Results
Overall, it was a very successful activity. The images that were gathered were all great, all that was required was to sort through them to find the best ones to be georeferenced. Figure 3 shows the mosaic that was created for section four (the section that my team was to georeference). Though the mosaic isn't perfect, I think that it turned out quite well considering the resources and procedures that were used to produce this result.
Discussion
I thought that this activity was a great success, especially after comparing it to the previous week's activity. The weather was perfect for what we were trying to achieve (there was no wind pushing the balloon around), and there were no other set backs to be fixed. We were all very satisfied with our results.
This follow-up activity is very much the same as the previous activity. Using a balloon and a constructed rig, aerial photos were taken of the UW-Eau Claire campus. Once the data was collected, the images were went through and georeferenced, to be put into a mosaic and thus creating an aerial map of the campus. There was much more work put into this activity, as the last activity was just a test run of sorts.
Methodology
Much of the preparation for this activity was just as it was in the previous activity, however there are a couple noteworthy alterations. The first is that there was essentially no rig for this balloon mapping launch. It was decided that the rig contraption was not essential to the quality of the image collection (merely a very weak backup for a crash landing) so the camera was just secured to the balloon with tape and string, hanging just below the balloon. Another addition to this launch was a stabilizing wing, which was taped to the camera. This addition ensured that the camera would stay at a relatively stable position, and wouldn't be rotating constantly. One final difference was that we filled the balloon with more helium, to ensure that it would rise faster and stay more stable in the air.
After making these revisions and preparing the activity just as before, the image collection began. The balloon was released in the middle of the campus mall, and the length indicators on the string was observed to make sure the balloon reached the desired height (400 meters). Once the balloon was at the correct altitude, the class began leading the balloon around campus as the camera snapped aerial images every second (Figure 1 shows an aerial photo of our starting location). The weather was much more cooperative, with much less wind. Because of this, the class was able to collect aerial photos of the entire campus without much difficulty. We started in the middle of the campus mall, walked around the new Davies Center, walked around Phillips Hall, cut back through the mall to the footbridge, and then walked around the Haas Fine Arts Center. Once that was completed, the balloon was brought down and taken back across the footbridge, where it was once again launched to continue data collection. Because the weather was so favorable, the team lead the balloon from the footbridge to Upper Campus, collecting aerial images the entire time.
 |
| Figure 1: Campus mall starting location (note the string on the right side of the image) |
 |
| Figure 2: The six different sections to be georeferenced |
Overall, it was a very successful activity. The images that were gathered were all great, all that was required was to sort through them to find the best ones to be georeferenced. Figure 3 shows the mosaic that was created for section four (the section that my team was to georeference). Though the mosaic isn't perfect, I think that it turned out quite well considering the resources and procedures that were used to produce this result.
 |
| Figure 3: The completed mosaic of section four |
I thought that this activity was a great success, especially after comparing it to the previous week's activity. The weather was perfect for what we were trying to achieve (there was no wind pushing the balloon around), and there were no other set backs to be fixed. We were all very satisfied with our results.
Sunday, April 14, 2013
Field Activity 9: Beginning Balloon Mapping
Introduction
This activity continues the work that was started in a previous activity (Activity 3). In that activity, we planned and created rigs to collect aerial photos of UW-Eau Claire's campus via balloon. Using the careful planning and constructing that was achieved during that activity (and after waiting for it to warm up a little) we were then able to finish our project.
Methods
There were several processes that had to be completed before we could actually begin the balloon mapping. First and foremost, the balloon had to be filled with helium. For this activity, we used a special weather balloon that was able to carry a payload of up to 3 lbs. While the balloon was being filled it was important to be sure that someone was always holding onto it, because it would be quite tragic if it floated away without even being used. As an extra precaution, we filled the balloon inside of the shed by Phillips Hall. Figures 1, 2, and 3 capture this process and display just how large the balloon is. Figure 3 also displays the next step, which was the securing of the balloon's opening. First, the opening is tied shut with a zip tie, then the remaining length is wrapped through a rubber ring, and then two more zip ties secure the extra length back to the original. The ring is necessary because the string will then be clipped to the balloon with a carabiner.
While the balloon was being filled, a team of students were required to measure out the string that would be secured to the balloon. Our target height for the balloon was 400 meters, so the team marked the string every 50 meters, and made the 400 meter mark a different color than the rest. Figure 4 shows their technique in this matter. After the string was measured, it was tied to a carabiner and then clipped on to the ring that was attached to the balloon. We then secured a GPS unit to the ring, and then tied the rig to on the string just under the balloon. After all of this preparation it was time to launch the balloon. In the middle of the campus mall the balloon was prepared for launch. The camera within the rig was set to continuous shot (so that it would take a picture every second), and then the rig was sealed. The balloon was then released, while the students holding the spool of string kept watch for the length markings (Figure 5).
This activity continues the work that was started in a previous activity (Activity 3). In that activity, we planned and created rigs to collect aerial photos of UW-Eau Claire's campus via balloon. Using the careful planning and constructing that was achieved during that activity (and after waiting for it to warm up a little) we were then able to finish our project.
Methods
There were several processes that had to be completed before we could actually begin the balloon mapping. First and foremost, the balloon had to be filled with helium. For this activity, we used a special weather balloon that was able to carry a payload of up to 3 lbs. While the balloon was being filled it was important to be sure that someone was always holding onto it, because it would be quite tragic if it floated away without even being used. As an extra precaution, we filled the balloon inside of the shed by Phillips Hall. Figures 1, 2, and 3 capture this process and display just how large the balloon is. Figure 3 also displays the next step, which was the securing of the balloon's opening. First, the opening is tied shut with a zip tie, then the remaining length is wrapped through a rubber ring, and then two more zip ties secure the extra length back to the original. The ring is necessary because the string will then be clipped to the balloon with a carabiner.
 |
| Figure 1: Preparing the balloon. |
 |
| Figure 2: Filling the balloon with helium. |
 |
| Figure 3: The balloon is filled, and the opening is secured with zip ties. A rubber loop is also attached so that the string can be clipped on with a carabiner. |
 |
| Figure 4: The string is marked in this manner every 50 meters |
 |
| Figure 5: After releasing the balloon, the string is observed to find the markings |
Once the balloon was at 400 meters, it was pulled around campus so that images were taken of most of the campus mall (Figure 6 shows the balloon and rig in flight). It was important to keep an eye on the string, and navigate away from tall objects like light poles, trees, and tall buildings. The class did this entire process twice: the first time with a standard digital camera, and a second time with a flipcam that took video footage. After the entire process, all of the data was uploaded onto a computer. We were then required to go through all of the images and select several that were perpendicular to the ground (this creates less distortion on an aerial map). Once enough suitable photos were selected, they were georeferenced and then mosaiced using either ArcMap, ERDAS Imagine, or Mapknitter.
 |
| Figure 6: The balloon, rig, and GPS unit in flight. |
Results
Because it was such a windy day, there were little suitable photos for the Mosaic process. There were several photos of Eau Claire's city horizon (Figure 7), but there was little to work with in regards to aerial mapping. However, each of us worked with what we had and a rough mosaic was created. Figure 8 displays an elementary aerial map that was created using Mapknitter.
 |
| Figure 7: With so much wind, photos such as this were quite numerous |
 |
| Figure 8: An aerial map using four aerial photos and Mapknitter. The faded background is a reference image. |
This was merely the results of our first launch, however. Our second launch was even more eventful. While we were leading the balloon across the footbridge, the string that was attached to the balloon snapped. The rig fell into the river, and the balloon floated into the distance. Luckily, the rig was a Styrofoam case and the camera was waterproof. We were able to recover both, so the data was acquired (with similar results to the previous launch).
Discussion
I thought that this activity was very exciting and a great learning experience. It was really cool to go through all of this work and then finally see the fruits of our labor. Though the wind put a damper on our plans, and the balloon dropped its payload the second time, I think that this activity was quite successful. We will be continuing this work in our next activity, hopefully with even more great results.
Sunday, April 7, 2013
Field Activity 8: Final Land Navigation
Introduction
This was the final activity in a large span of navigation activities. We began this learning experience by creating topographic maps of our study area. After this, we proceeded to learn how to navigate using the topographic map and a compass, and finally with a GPS unit. During this activity, we were to navigate to every single checkpoint on the property (15 points total), using a GPS and our maps with each checkpoint plotted. To add to the fun, each participant got an extra piece of equipment: a paintball gun. Throughout the activity we had to avoid being ambushed by other teams (or try to attack other teams), all while navigating to the checkpoints.
Study Area
For each of these activities, the class met at the University's Priory. This property is off campus and is on a 112 acre plot of forested land, perfect for navigation activities. While this location was perfect to learn these navigation techniques, it is also home to the University's Children's Center. Because we were outfitted with a paintball gun and a full face mask, we had to be careful where we navigated during the activity. Even though all the necessary authorities were notified of this activity, we did not wish to start any panic or cause any concern. Our professor stressed how important it was to avoid any areas within sight of the priory during the activity. He also advised us to stay clear of areas within sight of the highway to the north of priory, and the house to the southeast (See Figure 1 for restricted zones). With all of this in mind, as well as the massive amounts of snow on the ground, it was quite a terrain to navigate.
Methodology
Throughout this activity, we used skills that we had learned from the previous three weeks of field activities. We used navigation techniques learned from prior activities to navigate the terrain for one last time, this time trying to locate each checkpoint. For starters, we used the same map that we had made in the first navigation exersize, though it was slightly modified. This time we had to deal with restricted zones, but we also had the locations of each checkpoint on our map (Figure 2).
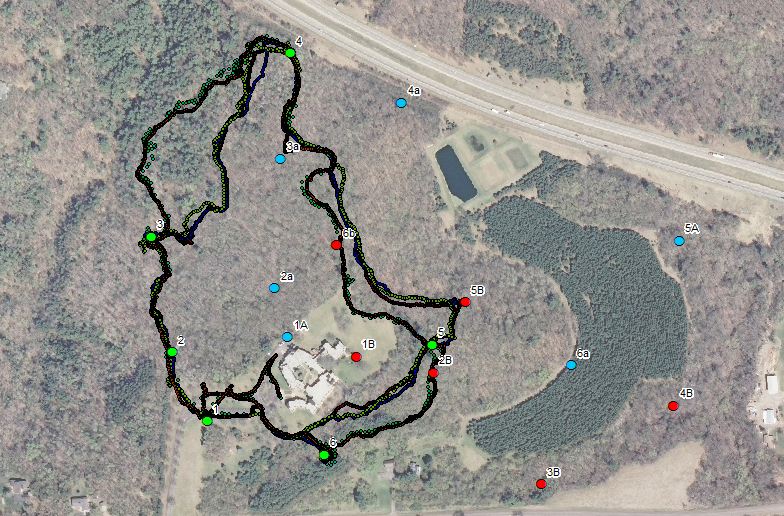
Just by looking at the map, it is easy to tell that each team would have a lot of ground to cover. After preparing for the trek (familiarizing ourselves with the paintball guns and the masks), we met up with our teams to try and come up with a strategy. Each participant used a tracklog feature on their GPS to track their navigation route once the activity was complete. Looking at Figure 2 for reference, each team started at point 1A. Our team decided to avoid traffic by going to point 6b first and then navigating around the priory to complete the course in a counter-clockwise direction. However, we were not the only team to come up with this plan. Our professor instructed us to wait 5 minutes before we could open fire, so we got to the first point with no conflict. However, after reaching that point our team lost our map so we negotiated with another team and began to work together. We then navigated by using our GPS units and our map. The basic navigation technique that we used was just looking at the lay of the land and comparing that with the topographic map to find each point. Once we were certain that we were close, we utilized the GPS units to compare more exact coordinates with the points on the map. At each checkpoint, we took a waypoint with our GPS units to mark that we had successfully navigated to that checkpoint. Figure 3 shows our teams route, as well as the waypoints at each checkpoint that we successfully navigated to. Figure 4 shows my individual tracklog, and Figure 5 shows the tracklogs of the entire class.


 Discussion
Discussion
Throughout the activity, our team encountered several problems. The first and most significant problem was the loss of our map after reaching our first point. Without a map to use, we would have been quite hopeless. The map was so important because it marked where each point was, and it had a coordinate grid as well. With nothing but a GPS unit, we would have been clueless as to where to navigate. Luckily, another team agreed to help, and we continued the activity together. Not long after this, as we were navigating from point 2B to 6, we ran into another group and got into a firefight. Other than this, we ran into few other groups. Another big problem that occurred was that we were in a crunch for time towards the end of the navigation. As we navigated from point 3a to 3, we realized that there wasn't much time left. For some reason, we had trouble finding point 3 as well, so this didn't add to the situation. In the end, we decided to take a waypoint because we knew that we were quite close (this is why there is a waypoint between 3 and 2a in Figure 3). We then traveled to point 2a and then back to 1A just to find out that we still had a couple minute, and probably could have still made it to the remaining two points. I think that we relied too heavily on the map and didn't use the coordinate grid and GPS coordinates to their full potential. Also, if we had brought along the exact coordinates of the checkpoints, it would have been much easier to compare to the GPS location and we could have navigated more accurately.
Conclusion
Overall, I thought that this was a fun activity to be a part of. The addition of the paintball guns transformed the activity entirely. Not only were our navigational skills required, but we also had to stay alert for other teams that may cross our path. It added a little excitement, and I think the bruises and paint splatters that were compared afterwards can attest to that fact.
This was the final activity in a large span of navigation activities. We began this learning experience by creating topographic maps of our study area. After this, we proceeded to learn how to navigate using the topographic map and a compass, and finally with a GPS unit. During this activity, we were to navigate to every single checkpoint on the property (15 points total), using a GPS and our maps with each checkpoint plotted. To add to the fun, each participant got an extra piece of equipment: a paintball gun. Throughout the activity we had to avoid being ambushed by other teams (or try to attack other teams), all while navigating to the checkpoints.
Study Area
For each of these activities, the class met at the University's Priory. This property is off campus and is on a 112 acre plot of forested land, perfect for navigation activities. While this location was perfect to learn these navigation techniques, it is also home to the University's Children's Center. Because we were outfitted with a paintball gun and a full face mask, we had to be careful where we navigated during the activity. Even though all the necessary authorities were notified of this activity, we did not wish to start any panic or cause any concern. Our professor stressed how important it was to avoid any areas within sight of the priory during the activity. He also advised us to stay clear of areas within sight of the highway to the north of priory, and the house to the southeast (See Figure 1 for restricted zones). With all of this in mind, as well as the massive amounts of snow on the ground, it was quite a terrain to navigate.
 |
| Figure 1: Highlighted areas were the restricted zones during this activity |
Throughout this activity, we used skills that we had learned from the previous three weeks of field activities. We used navigation techniques learned from prior activities to navigate the terrain for one last time, this time trying to locate each checkpoint. For starters, we used the same map that we had made in the first navigation exersize, though it was slightly modified. This time we had to deal with restricted zones, but we also had the locations of each checkpoint on our map (Figure 2).
 |
| Figure 2: Our Starting Map |
{kind=link}
{kind=link}
Figure 3: Team Tracklog
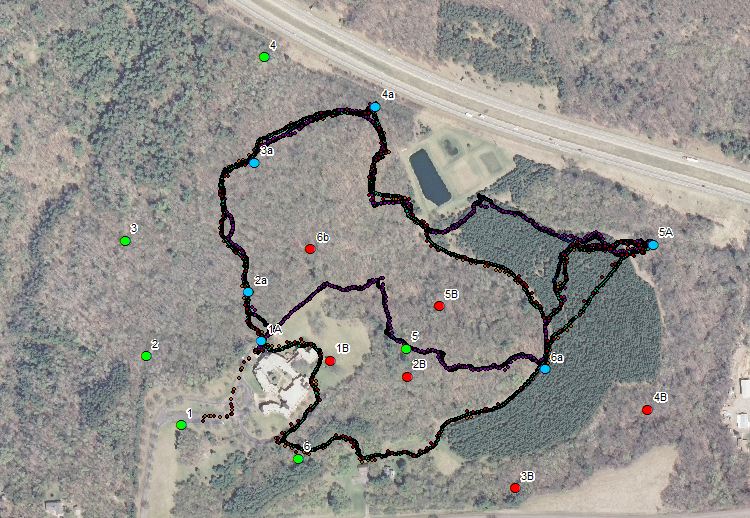
Figure 4: My Tracklog. As can be seen in the image, my GPS had some PDOP issues
because sometimes the points of the tracklog weren't quite accurate.
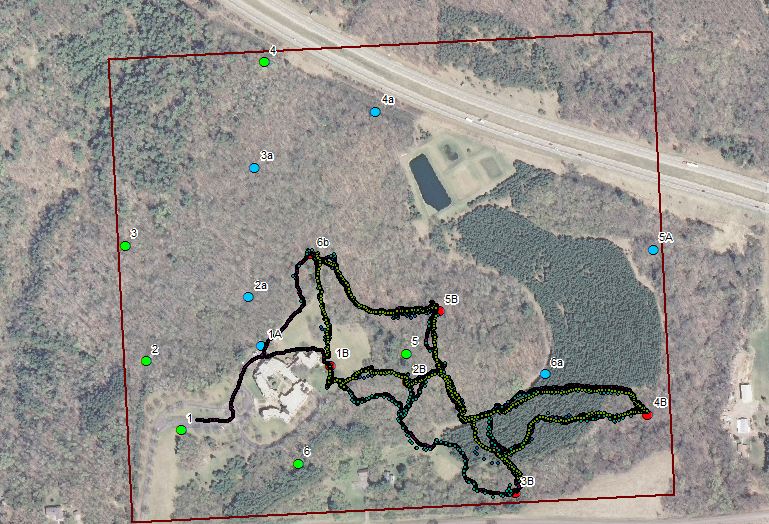
Figure 5: The tracklog of the entire class. Several different routes can be seen,
though they all seem to make the same loop.
Throughout the activity, our team encountered several problems. The first and most significant problem was the loss of our map after reaching our first point. Without a map to use, we would have been quite hopeless. The map was so important because it marked where each point was, and it had a coordinate grid as well. With nothing but a GPS unit, we would have been clueless as to where to navigate. Luckily, another team agreed to help, and we continued the activity together. Not long after this, as we were navigating from point 2B to 6, we ran into another group and got into a firefight. Other than this, we ran into few other groups. Another big problem that occurred was that we were in a crunch for time towards the end of the navigation. As we navigated from point 3a to 3, we realized that there wasn't much time left. For some reason, we had trouble finding point 3 as well, so this didn't add to the situation. In the end, we decided to take a waypoint because we knew that we were quite close (this is why there is a waypoint between 3 and 2a in Figure 3). We then traveled to point 2a and then back to 1A just to find out that we still had a couple minute, and probably could have still made it to the remaining two points. I think that we relied too heavily on the map and didn't use the coordinate grid and GPS coordinates to their full potential. Also, if we had brought along the exact coordinates of the checkpoints, it would have been much easier to compare to the GPS location and we could have navigated more accurately.
Conclusion
Overall, I thought that this was a fun activity to be a part of. The addition of the paintball guns transformed the activity entirely. Not only were our navigational skills required, but we also had to stay alert for other teams that may cross our path. It added a little excitement, and I think the bruises and paint splatters that were compared afterwards can attest to that fact.
Sunday, March 24, 2013
Activity 7: Land Navigation With GPS
Introduction
This activity was completed so that we would understand how to navigate when we do have some equipment that is a bit more up to date. Whereas in the previous activity we learned how to navigate using only the most basic technology, this activity involved using a GPS device to navigate between preset points on UW-Eau Claire's Priory property. This being said, it was a much more simple activity, because all that we had to do was navigate to the given UTM coordinates as the GPS displayed our current coordinates, as opposed to drawing bearing lines trying to stay on the set bearing.
Methodology
Much like the previous activity, we were split into teams to navigate to different points within the University's Priory property. Each team was assigned to a new course for this activity, so that we would be navigating to unfamiliar points. Zach, Laurel, and I were assigned to Course 3, and we would be doing the course in regular order instead of backwards like we had previously. Again, we were given a sheet with all the coordinates on it (Figure 1), but this time the only other materials that we needed was our GPS unit (Figure 2). Once we found our starting point, we simply had to navigate to match the coordinates on our GPS with the corresponding point coordinate.
Because the coordinate system of the area is a simple grid, it was fairly straightforward to navigate from point to point. All that our team did was determine which direction we were suppose to head by visualizing where the next point is based on the change of the coordinates. For example, going from point 1B (which had coordinates of 4957994, 617866) to point 2B (with coordinates of 4957973, 617972) required us to travel towards the E/SE direction. If you were to calculate the exact difference between the two coordinates, you would discover that point 2B is 106 meters East and 21 meters South of Point 1B. This method wasn't the most accurate, but it was the easiest to do on the run. We had no trouble finding all of the required flags (Figure 3).
Results
Throughout this exercise, our GPS units recorded tracklogs of our navigation progress. By importing these into ArcMap, we were able to visualize our navigation throughout the course and compare our results to the other team that navigated the same course as us. This was also pretty neat, because it gives us all a picture of how much land we covered as we completed the activity. The four images below display the tracklogs of our GPS units. There is an image for each course, and a single image with all of the tracklogs on it.
Discussion
This activity was quite educational and interesting. It was nice to get to explore the winter landscape once more and discover how to navigate with nothing but a GPS unit. As the figures above show, the class covered a lot of terrain, so it was quite an adventure.
This activity was completed so that we would understand how to navigate when we do have some equipment that is a bit more up to date. Whereas in the previous activity we learned how to navigate using only the most basic technology, this activity involved using a GPS device to navigate between preset points on UW-Eau Claire's Priory property. This being said, it was a much more simple activity, because all that we had to do was navigate to the given UTM coordinates as the GPS displayed our current coordinates, as opposed to drawing bearing lines trying to stay on the set bearing.
Methodology
Much like the previous activity, we were split into teams to navigate to different points within the University's Priory property. Each team was assigned to a new course for this activity, so that we would be navigating to unfamiliar points. Zach, Laurel, and I were assigned to Course 3, and we would be doing the course in regular order instead of backwards like we had previously. Again, we were given a sheet with all the coordinates on it (Figure 1), but this time the only other materials that we needed was our GPS unit (Figure 2). Once we found our starting point, we simply had to navigate to match the coordinates on our GPS with the corresponding point coordinate.
 |
| Figure 1: The coordinate sheet. Our team did course 3 (Points 1B through 6B) |
 |
| Figure 2: The GPS unit that was used for navigation |
 |
| Figure 3: Zach and I pinpoint the coordinates of a point on the course. |
Results
Throughout this exercise, our GPS units recorded tracklogs of our navigation progress. By importing these into ArcMap, we were able to visualize our navigation throughout the course and compare our results to the other team that navigated the same course as us. This was also pretty neat, because it gives us all a picture of how much land we covered as we completed the activity. The four images below display the tracklogs of our GPS units. There is an image for each course, and a single image with all of the tracklogs on it.
 |
| Figure 4: Tracklogs of the team members who completed Course 1. |
 |
| Figure 5: Tracklogs of the team members who completed Course 2. |
 |
| Figure 6: Tracklogs of the team members who completed Course 3. |
 |
| Figure 7: Tracklogs of all the students in the class. |
Discussion
This activity was quite educational and interesting. It was nice to get to explore the winter landscape once more and discover how to navigate with nothing but a GPS unit. As the figures above show, the class covered a lot of terrain, so it was quite an adventure.
Sunday, March 10, 2013
Activity 6: Traditional Land Navigation
This activity involved learning the methods of traditional land navigation (using only a topographic map and a navigation compass). It is essential to have these skills when working in the field, as we may not always have access to GPS units. We then tested our navigation skills by trekking throughout a 112 acre plot, trying to locate five previously placed flags in a certain order.
Methods
The class all met at UW-Eau Claire's Priory for this activity. With about 112 acres of forested land, it was a perfect location to do some basic land navigation. Once everyone arrived, we were given the coordinates of the different flags that we were to find (Figure 1). The coordinates of the flags were given in UTM meter units, so that we could plot them on our topographic maps from the previous activity.
 |
| Figure 1: Coordinates of the different checkpoints. |
 |
| Figure 2: Both topographic maps (one with fine contour lines, the other with an aerial background). |
 |
| Figure 3: Zach plots the checkpoints on his topographic map. |
 |
| Figure 4: Navigation map, completed with checkpoints and bearing lines. Our course started at the point to the bottom left, travelling counter clockwise. |
After we completed the plotting of our maps, we began to navigate the course. Because we were to do the course backwards, we started at point 1 and navigated to point 6, then point 5 and so on. We navigated from one point to the next by adjusting the bezel of the compass to the corresponding bearing angle, and turning our whole body to align the arrow with the case and the north-indicating needle ("putting red in the shed" as our instructor explained to us). With those two feature's aligned, the heading arrow was pointing in the correct direction. Because it wouldn't be very accurate or efficient to walk while reading a bearing (you could easily wander off course), our team worked out a great system for navigation. One person stayed put to measure the bearing, while another ran ahead. The person with the bearing would then instruct the other member on where to go to line up with the heading arrow. After everything was lined up, the team would advance to this new point. We took turns with each duty so that we all received equal experience. At first, one member of the team would measure paces so that we could calculate the distance that we've traveled, but in time we decided that it was quicker and easier to just use our navigation map as a reference. Using these methods we successfully navigated to each checkpoint with surprising accuracy.
Discussion
Our team ran into very little setbacks, and I thought that it was a quite enjoyable and beneficial experience. I've never navigated with only a compass and map, so I thought it was very interesting to finally accomplish. I'm glad that we did this activity during the winter because it would have been much more difficult to traverse the terrain with full brush. All that we had to worry about during this activity was a fresh snowfall and an advancing snowstorm.
Sunday, March 3, 2013
Activity 5: Land Nav Intro
Introduction
This short report is covering a brief intro to our upcoming land navigation activity. The point of this class' activity was to create a topographic map that would be needed to navigate the terrain at the University's Priory. We also completed a test to measure how many paces each student takes over 100 meters. Because this activity was so brief, the report will not be very extensive though a more detailed report will be completed for next week.
Methods
First, the entire class was required to test for their paces at a distance of 100 meters. To do this, a rangefinder was used to accurately measure out a 100 meter stretch. The beginning and end of this distance were then marked and it was possible to begin taking our paces. Each student walked at a steady pace while counting the number of times we make a step with our right foot.
After this was complete, the class headed in to the lab to work on our topo maps. We were encouraged to make two maps: one map with a very high detail of the topography, and one map with slightly less detailed topography but with an aerial map as a backdrop. The aerial map will be good to find a general location when navigating, while the detailed topographic map will enable us to precisely find our location. Each of these maps had a grid to help us to plot points on the map accurately.
The aerial map has contour lines at intervals of 5 meters, creating a very basic topographic map. The grid for this map is in intervals of 20 meters. The data for the 5 meter contour lines were accessed via USGS. The detailed topographic map has contour lines at intervals of 2 feet, displaying much more detailed elevation data. The grid for this map is in intervals of 25 meters (it has a larger value to decrease clutter).
Results
After finishing the pace test, I gathered results of 62.5, 61, 61.5 and 61 paces, in that order. With these results, I determined that a suitable pace for me is 61.
I am satisfied with the topographic maps that were created (Figures 1 and 2).
Discussion
This was a very simple activity, but we did encounter several problems when it came to the maps. The data for the 2 foot contour lines wasn't projected in the same coordinate system as the rest of the map data. This small setback was solved by importing the same coordinate system as the rest of the data (we decided to use NAD83 UTM Zone 15N), and viewing the entire map in that projection. We learned that it was vital to make sure that all of our data was using the correct projection, to help with the development of the map, and to ensure an accurate display. Overall, this activity was very simple yet quite informative.
This short report is covering a brief intro to our upcoming land navigation activity. The point of this class' activity was to create a topographic map that would be needed to navigate the terrain at the University's Priory. We also completed a test to measure how many paces each student takes over 100 meters. Because this activity was so brief, the report will not be very extensive though a more detailed report will be completed for next week.
Methods
First, the entire class was required to test for their paces at a distance of 100 meters. To do this, a rangefinder was used to accurately measure out a 100 meter stretch. The beginning and end of this distance were then marked and it was possible to begin taking our paces. Each student walked at a steady pace while counting the number of times we make a step with our right foot.
After this was complete, the class headed in to the lab to work on our topo maps. We were encouraged to make two maps: one map with a very high detail of the topography, and one map with slightly less detailed topography but with an aerial map as a backdrop. The aerial map will be good to find a general location when navigating, while the detailed topographic map will enable us to precisely find our location. Each of these maps had a grid to help us to plot points on the map accurately.
The aerial map has contour lines at intervals of 5 meters, creating a very basic topographic map. The grid for this map is in intervals of 20 meters. The data for the 5 meter contour lines were accessed via USGS. The detailed topographic map has contour lines at intervals of 2 feet, displaying much more detailed elevation data. The grid for this map is in intervals of 25 meters (it has a larger value to decrease clutter).
Results
After finishing the pace test, I gathered results of 62.5, 61, 61.5 and 61 paces, in that order. With these results, I determined that a suitable pace for me is 61.
I am satisfied with the topographic maps that were created (Figures 1 and 2).
 |
| Figure 1: Topographic map with contour lines at 2 foot intervals |
 |
| Figure 2: Topographic map with an aerial and contour lines at 5 meter intervals |
This was a very simple activity, but we did encounter several problems when it came to the maps. The data for the 2 foot contour lines wasn't projected in the same coordinate system as the rest of the map data. This small setback was solved by importing the same coordinate system as the rest of the data (we decided to use NAD83 UTM Zone 15N), and viewing the entire map in that projection. We learned that it was vital to make sure that all of our data was using the correct projection, to help with the development of the map, and to ensure an accurate display. Overall, this activity was very simple yet quite informative.
Subscribe to:
Comments (Atom)